2025年10月24日-27日,第六届国际非线性力学最新进展会议(RANM 2025)在杭州召开,RANM 2025聚焦非线性力学前沿,覆盖动力学与振动、摩擦与冲击等,兼顾高端装备与机器人领域的理论研究与工程应用。太原理工大学机器人科学与工程学院赵杰、博士后唐建、研究生崔忠瑞、刘洺良和徐子腾等参加会议并进行学术汇报,分享近期研究工作。


在RANM 2025会议上,唐建围绕非线性振动筛板的理论建模、多目标优化以及非线性系统的数据驱动建模方法等作分享报告。崔忠瑞围绕仿人机械臂非结构化识别、运动控制等内容作研究汇报。两位报告人与国际同行深入交流,充分展现我院在高端装备与机器人领域最新的研究成果。


我院研究生张旭峰前往浙江德清县参加第二届空间机构学术会议。会议聚焦我国未来重大航天任务中空间机构技术研究热点和核心方向,展示空间机器人机构创新与智能控制等前沿领域,探索“机器人+航天”的交叉应用。
我院研究生黄锦荣、刘宏飞、陈阳和李诗雨前往北京参加了2025年IEEE机器人与仿生系统国际会议(IEEE CBS 2025),会议围绕智能机器人及仿生系统的驱动、感知和控制,重点展示仿生机器人集成方面的突破性进展,标志着机器人向真正智能、灵巧且环境共生的仿生机器人系统迈进。
我院研究生宋星平和武海军参加第八届中国模式识别与计算机视觉大会(PRCV 2025),大会以“智汇沪上,海纳视界”为主题,汇聚众多专家学者,展示计算机视觉前沿成果,包含机器人自主导航、具身智能视觉感知、3D视觉与重建等,推动行业创新发展。
我院研究生翟天鸿、赵帅参加了2025年先进越野系统科学与技术年会,会议聚焦该领域前沿技术与应用,设无人摩托车比赛,基于强化学习的四足机器人、无人液压挖掘机、冰雪防滑算法等成果。
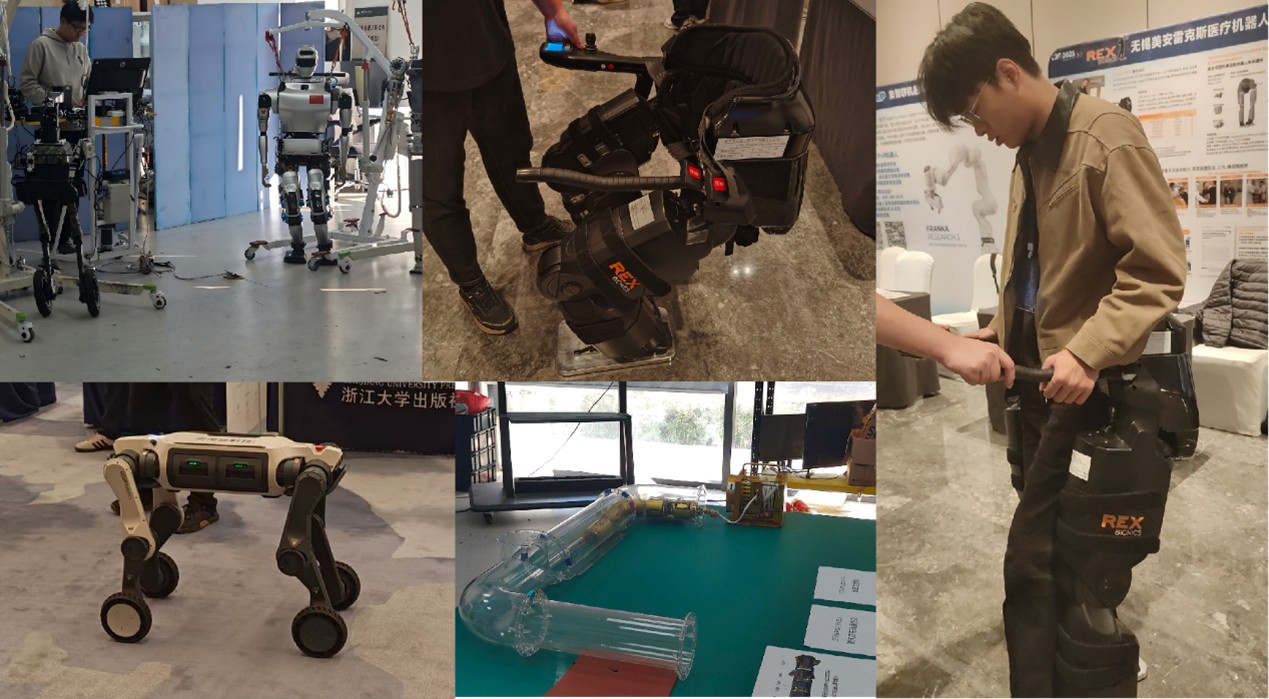
各类会议中展示出了机器人各领域的最新研究成果和前沿研究方向,我院研究生通过参会深入了解了国际前沿动态,为未来开展人形机器人、四足机器人、外骨骼机器人、管道机器人等热门仿生机器人领域研究提供了宝贵经验。机器人科学与工程学院鼓励师生在学术交流中拓宽视野、碰撞思维,展现出学院在研究生学术培养的蓬勃活力和高端装备与仿生机器人科研领域的巨大决心。
