近日,由我院师生与浙江强脑科技公司技术人员组成的联合攻关小组进行为期两周的密集调试,成功利用非侵入式脑电与肌电混合接口设备,实现了对六自由度协作机械臂与四足机械狗的协同、直观操控,这一成果标志着我院在脑-机-机器人交叉融合研究方向上迈出了坚实而关键的一步。
本次调试的核心目标,是将可采集高精度神经信号的脑电头戴设备“脑帽”与采集肌电信号的手环与我院现有的机器人硬件平台进行深度集成与功能验证,包括一台高性能六自由度协作机械臂与一只仿生四足机械狗。在学院师生以及强脑科技多位工程师的共同努力下,联合团队克服了信号解码、指令映射、多模态控制融合等一系列技术挑战。
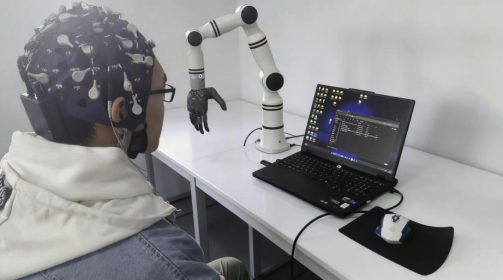
操作人员仅需佩戴肌电手环,通过做出不同幅度和模式的手臂动作,系统便能实时解码其运动意图,并将其转化为精准的控制指令。通过特定的手臂旋前、旋后或屈曲动作,可流畅地控制机械臂末端执行器在三维空间中的移动与抓取操作;同时,通过预设的不同手势模式,能够远程指挥四足机械狗完成前进、后退、左右转向等稳定步态行走。此外,实验人员还可佩戴脑帽,通过采集脑电信号,控制机械臂实现空间运动。

此次成功调试是我院长期聚焦智能机器人前沿、积极推动产学研深度融合战略的体现,为我院在脑机接口+具身智能这一前沿交叉领域确立了特色研究方向,不仅验证了现有技术路线的可行性,为后续开展基于脑机接口的智能康复辅助、特种环境远程作业等具体应用研究奠定了坚实的基础,而且深化了与行业领先企业的战略伙伴关系,为未来共同申报重大项目、推动技术转化落地构建了高效通道。下一步我院将依托强脑科技在脑电信号处理、神经接口技术等方面的核心优势,结合学院在机器人系统集成与控制方面的技术沉淀,共同助力山西打造一个集科研攻关、人才培养、成果转化于一体的高水平创新平台,为全国医疗健康、智能制造、助老助残、应急等领域的高质量发展,贡献山西力量,助力学校在服务国家战略和地方经济社会发展中发挥更大作用。
初审:张金柱
复审: 王 宇
终审:熊晓燕
